选择“File”》“New”》“Robot”来 新建一个机器人。它会首先要你输入这个机器人的名字(注意名字首字母要大写哦),然后要你输入包的名字(就是保存这个机器人的文件夹名称),这样就生成了 一个蠢蠢的机器人XForce的代码了~因为我们还没替它加上人工智能,呵呵!
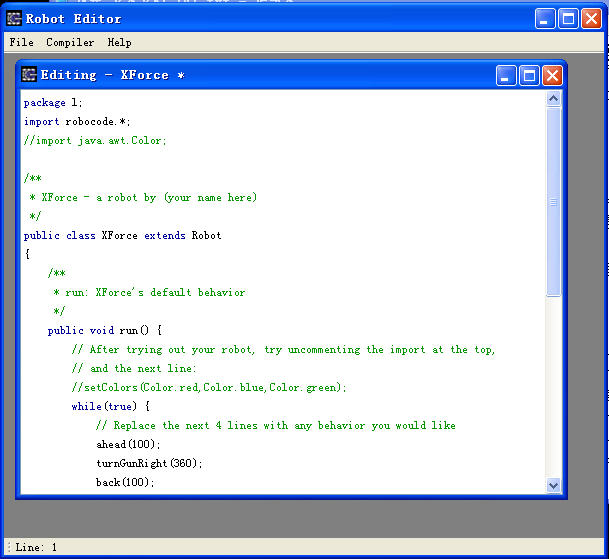
现在单击菜单的Complie下的Complie进行编译,保存好,我们的机器人已经生产出来咯~
现在关闭Editor,在进入New Battle,Pakeage下选择你刚才的包的名字,Robot下就有了我们新建的XForce机器人了~添加进去吧,然后选择多几个其他的机器人,开始战斗!
看~我们的XForce在战斗了!
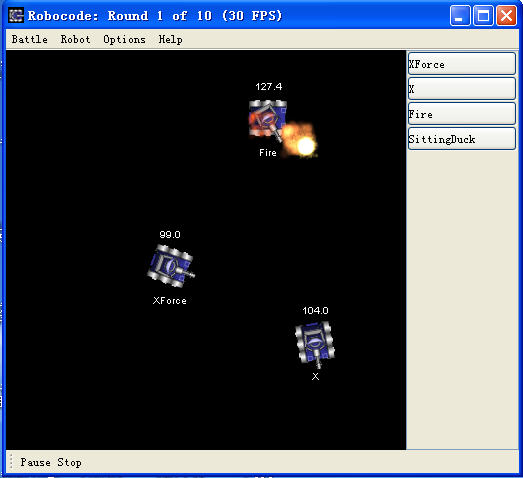
是否觉得它太蠢了点呢?来,继续来学习~~
Robocode 机器人是一个图形化的坦克,请注意,机器人有一门可以旋转的炮,炮上面的雷达也是可以旋转的。机器人坦克车(Vehicle)、炮(Gun)以及雷达 (Radar)都可以单独旋转,也就是说,在任何时刻,机器人坦克车、炮以及雷达都可以转向不同的方向。缺省情况下,这些方向是一致的,都指向坦克车运动 的方向。
附:Robot 命令
Robocode 机器人的命令集都收录在 Robocode API Javadoc 中。这些命令都是 robocode.Robot 类的公共方法。
(1)移动机器人、炮和雷达
移动机器人及其装备的基本命令:
-
turnRight(double degree) 和 turnLeft(double degree) 使机器人转过一个指定的角度。
-
ahead(double distance) 和 back(double distance) 使机器人移动指定的像素点距离;这两个方法在机器人碰到墙或另外一个机器人时即告完成。
-
turnGunRight(double degree) 和 turnGunLeft(double degree) 使炮可以独立于坦克车的方向转动。
-
turnRadarRight(double degree) 和 turnRadarLeft(double degree) 使炮上面的雷达转动,转动的方向也独立于炮的方向(以及坦克车的方向)。
这些命令都是在执行完毕后才把控制权交还给程序。此外,转动坦克车的时候,除非通过调用下列方法分别指明炮(和雷达)的方向,否则炮(和雷达)的指向也将移动。
-
setAdjustGunForRobotTurn(boolean flag):如果 flag 被设置成 true,那么坦克车转动时,炮保持原来的方向。
-
setAdjustRadarForRobotTurn(boolean flag):如果 flag 被设置成 true,那么坦克车(和炮)转动时,雷达会保持原来的方向。
-
setAdjustRadarForGunTurn(boolean flag):如果 flag 被设置成 true,那么炮转动时,雷达会保持原来的方向。而且,它执行的动作如同调用了 setAdjustRadarForRobotTurn(true)。
(2)获取关于机器人的信息
-
getX() 和 getY() 可以捕捉到机器人当前的坐标。
-
getHeading()、getGunHeading() 和 getRadarHeading() 可以得出坦克车、炮或雷达当前的方向,该方向是以角度表示的。
-
getBattleFieldWidth() 和 getBattleFieldHeight() 可以得到当前这一回合的战场尺寸。
(责任编辑:laiquliu)
|








